
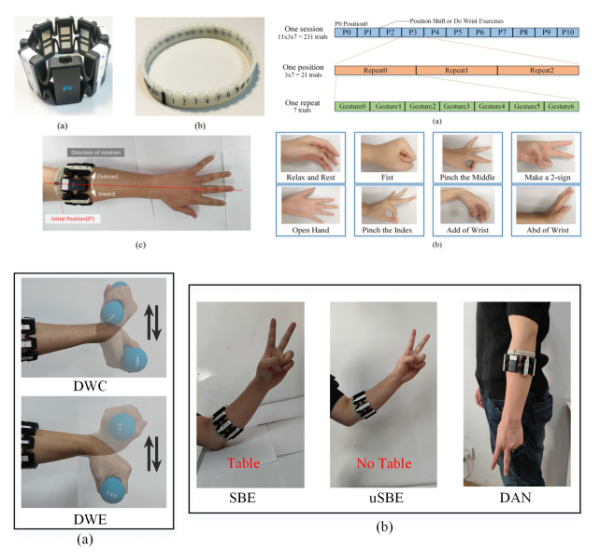
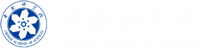
近日,中國科學(xué)院沈陽自動化研究所醫(yī)療康復(fù)機器人研究組在非理想手勢肌電信號數(shù)據(jù)集構(gòu)建方面取得進展。相關(guān)成果以SeNic: An Open Source Dataset for SEMG-Based Gesture Recognition in Non-Ideal Conditions為題發(fā)表在IEEE Transactions on Neural Systems and Rehabilitation Engineering上。
| 相關(guān)新聞: |
| 沈陽自動化所磁控連續(xù)體微型機器人研究獲進展 |
| 沈陽自動化所提出AFM和掃描微透鏡關(guān)聯(lián)顯微鏡的跨尺度成像新方法 |
| 沈陽自動化所在連續(xù)體機器人形狀感知研究方面取得進展 |

京公網(wǎng)安備110402500036號
© 中國科學(xué)院微電子研究所 版權(quán)所有
地址:北京市朝陽區(qū)北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學(xué)習(xí)園地