
近日,中國科學(xué)院沈陽自動化研究所機器人學(xué)國家重點實驗室微納米自動化課題組在磁控連續(xù)體微型機器人方面取得的最新研究成果(A Flexible Magnetically Controlled Continuum Robot Steering in the Enlarged Effective Workspace with Constraints for Retrograde Intrarenal Surgery),作為前封面文章(Front Cover)發(fā)表在Advanced Intelligent Systems上。
微創(chuàng)手術(shù)是現(xiàn)代醫(yī)學(xué)的標(biāo)志,手術(shù)導(dǎo)管機器人可以幫助醫(yī)生對病人狹小腔道內(nèi)的組織結(jié)構(gòu)進行精確微創(chuàng)干預(yù)治療。然而,微型化、智能化是手術(shù)導(dǎo)管機器人的發(fā)展趨勢及面臨的挑戰(zhàn)。傳統(tǒng)手術(shù)軟鏡導(dǎo)管由于機械拉線驅(qū)動方式的限制,較難進一步縮小整體尺寸且保證其可控性,因而限制了機器人在人體內(nèi)的應(yīng)用范圍。
該研究面向人體狹窄腔道內(nèi)患病組織的精準(zhǔn)治療,結(jié)合微納米技術(shù)提出了磁控連續(xù)體微型機器人的方法。該連續(xù)體機器人采用PDMS材料制備,包括PDMS軟管及磁性前端(總直徑2mm)。研究采用外磁場驅(qū)動,可控制該連續(xù)體機器人進行靈活彎轉(zhuǎn)、在管道內(nèi)穿行等動作。針對腎內(nèi)逆行手術(shù),研究論證了其在狹窄通道內(nèi)的靈巧運動性能及控制能力。同時,該柔性機器人可進一步縮小尺寸到亞毫米級,可面向人體更狹小腔道內(nèi)組織結(jié)構(gòu)進行靈活可控的微創(chuàng)治療,如腦神經(jīng)外科、眼內(nèi)手術(shù)或血管內(nèi)手術(shù)等。針對目前磁控系統(tǒng)有效工作空間受限問題,該工作還提出了一種有效擴大磁控連續(xù)體機器人工作空間的解決方案,為面向臨床應(yīng)用奠定了基礎(chǔ)。
微納米課題組專注于微納米機器人研究,從毫米級、微米級到納米級機器人開展了系列研究,在磁驅(qū)動毫米機器人、光驅(qū)動毫米機器人、熱驅(qū)動毫米機器人、氣泡微米機器人、細胞微米機器人、混合驅(qū)動納米機器人等方面取得了研究進展,相關(guān)成果發(fā)表在Small(2019)、ACS Applied Materials & nterfaces(2019/2020/2021)、IEEE Robotics and Automation Letters(2021)、Chemical Engineering Journal(2021)、Lab on a Chip(2016)上。
研究工作得到國家重點研發(fā)計劃、國家自然科學(xué)基金、中科院青年創(chuàng)新促進會、中科院創(chuàng)新交叉團隊,以及機器人學(xué)國家重點實驗室的支持。
Advanced Intelligent Systems封面刊載
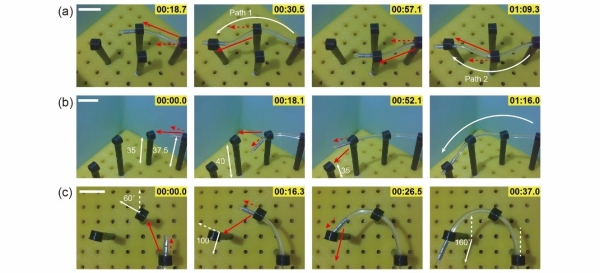
連續(xù)體機器人靈巧通過各種狹窄通道
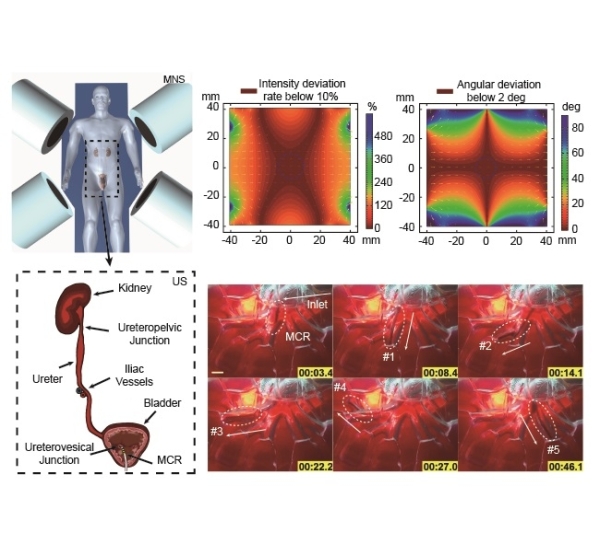
擴大電磁驅(qū)動系統(tǒng)有效操作空間
| 相關(guān)新聞: |
| 沈陽自動化所可重構(gòu)分子機器人研究獲進展 |
| 沈陽自動化所發(fā)表納米機器人及其生物醫(yī)學(xué)應(yīng)用研究綜述文章 |
| 《自然》刊發(fā)微型機器人新突破:細如發(fā)絲,兼容硅電子器件 |

京公網(wǎng)安備110402500036號
© 中國科學(xué)院微電子研究所 版權(quán)所有
地址:北京市朝陽區(qū)北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學(xué)習(xí)園地