
將電子器件微型化以生產(chǎn)細胞大小的機器人一直是人們追求的目標,但由于缺乏合適的微米級致動器系統(tǒng),該技術(shù)一直受到限制。
北京時間8月26日23時,學術(shù)期刊《自然》發(fā)表的一項研究介紹了一款新型致動器,它可以與現(xiàn)有硅電子器件兼容,制成已知的第一個尺寸小于0.1毫米(約為人的頭發(fā)寬度)的微型機器人。
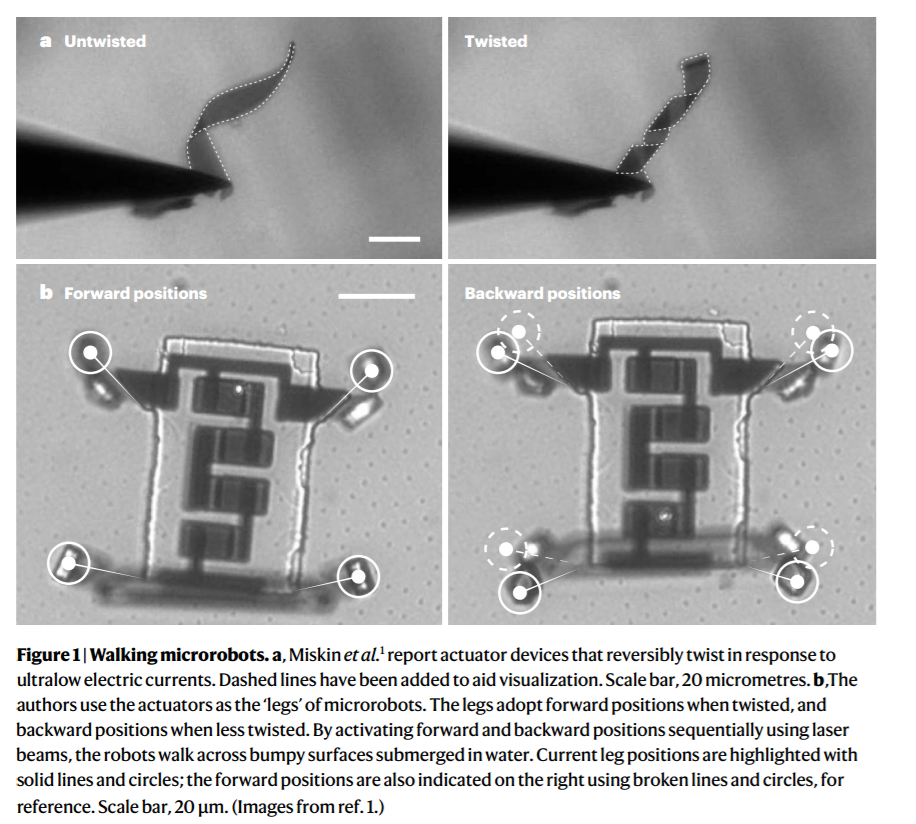
行走微型機器人:馬克·米斯金等人提出了可在超低電流下運動的制動器裝置
這項研究題為“Electronically integrated, mass-manufactured, microscopic robots”,由美國康奈爾大學和賓夕法尼亞大學的研究人員合作完成。
研究第一作者、美國賓夕法尼亞大學電氣與系統(tǒng)工程系助理教授馬克·米斯金(Marc Miskin)對澎湃新聞(www.thepaper.cn)記者表示,他們在設計這款新型制動器時有兩個主要目標:能夠彎曲成微小尺寸而不會斷裂、可以由硅電子標準信號進行控制。
米斯金介紹,新型制動器由一層鉑制成,只有十幾個原子的厚度。當把鉑放在水中,再施加電壓時,水中的原子會附著在鉑上或者從鉑上移除,由此產(chǎn)生驅(qū)動力。他表示,該過程所需的電壓與CMOS器件(互補金屬氧化物半導體)幾乎完全相同,“因此這項新的制動器技術(shù)完全符合制造微型電子控制機器人的需要”。

釋放前的微型機器人
在轉(zhuǎn)圈的微型機器人。通過改變剛性面板的樣式可以改變機器人的運動。這里后退相對機器人身體略微旋轉(zhuǎn),另機器人繞圈行走。視頻為8倍速。(00:16)
除了設計微型制動器外,米斯金和同事還開發(fā)了一個微型機器人原型,其中用到4個致動器作為機器人的腿。當受到激光刺激時,這些機器人就會彎曲,產(chǎn)生行走動作。操作者可以將激光照射到機器人的不同部位,來實現(xiàn)彎曲前腿或后腿的效果,從而推動機器人前進。
呈現(xiàn)圖")
作者認為,這些是已知的第一個尺寸小于0.1毫米的機器人,其中板載電子裝置用于控制驅(qū)動。他們在一塊4英寸的硅片上制造了超過100萬個行走機器人。這些機器人由板載硅太陽能電池驅(qū)動。
這些行走機器人能在高酸性環(huán)境和超過200開爾文(-73.15 攝氏度)的溫度變化中生存,并且可以通過皮下針頭注射,為探索生物環(huán)境內(nèi)的應用帶來了可能。
目前,這些機器人功能有限,它們比其他游泳機器人慢,不能感知環(huán)境,而且缺乏綜合控制。但作者認為,它們與現(xiàn)有硅技術(shù)的兼容性應該能夠開發(fā)更多的功能。
米斯金表示,他們下一步將思考這款微型機器人需要什么樣的電路以及如何使它們可編程。“好消息是半導體電子給了我們成熟的技術(shù),我們正致力于把它們組織起來,以制造下一代微型機器人。”
| 相關新聞: |
| 深圳先進院開發(fā)出高性能微流體柔性應變傳感器 |
| 深圳先進院等在軟體機器人形態(tài)學計算研究中獲進展 |
| 大連化物所等在柔性電子用微型超級電容器驅(qū)動的集成系統(tǒng)研究中獲進展 |

京公網(wǎng)安備110402500036號
© 中國科學院微電子研究所 版權(quán)所有
地址:北京市朝陽區(qū)北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學習園地