

圖片來源: Del Dottore et al.
藤蔓機器人,像其名字一樣可以蜿蜒生長在樹木或巖石周圍,以建造房屋或測量人類目前難以企及的自然環(huán)境中的污染情況。
這種機器人并不是新鮮事物,但傳統(tǒng)藤蔓機器人一般只依靠一種因素向上生長,比如熱或光,這意味著它們在某些環(huán)境中表現(xiàn)得并不理想。
為此,意大利技術(shù)研究院的Emanuela Del Dottore和同事開發(fā)了一種新的藤蔓機器人——FiloBot。它以光線、陰影或重力等為導(dǎo)向因素,通過熔化和擠壓塑料絲線將其纏繞成圓柱形,再冷卻固化,從而“打印”出自己的身體,即生長。機器人頭部通過一根細(xì)軟管連接在基座上,用于“打印”自身的塑料材料通過軟管被輸送上來。
“我們的機器人有一個嵌入式微控制器,可以處理多種刺激,并將頭部引導(dǎo)至精確位置生長,確保身體結(jié)構(gòu)得到保護(hù)。”Dottore介紹,這種對頭部方向的精細(xì)控制意味著機器人可以將自己包裹在樹上或?qū)淙~的陰影部分作為路標(biāo),輕松地在陌生地形上找到前進(jìn)方向。
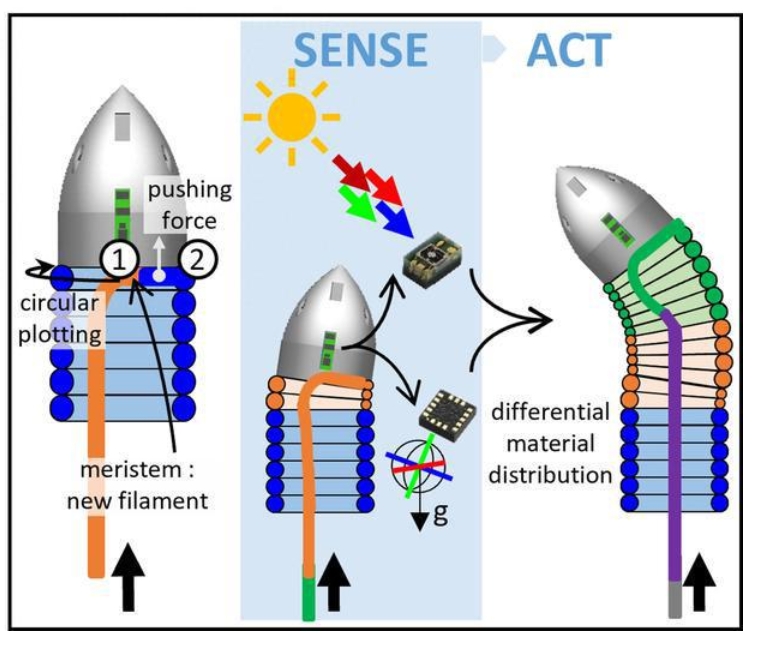
FiloBot 的頭部示意圖 Del Dottore et al. 9, Eadi5908 (2024)
FiloBot每分鐘可生長7毫米。這一生長速度雖然慢于許多傳統(tǒng)機器人,但這意味著FiloBot不會破壞敏感的自然環(huán)境。

目前,研究團隊還沒有明確FiloBot的具體用途,但希望它能被部署到樹梢等人類難以到達(dá)的地方收集數(shù)據(jù)。相關(guān)研究近日發(fā)表于《科學(xué)-機器人》。
相關(guān)論文信息:https://doi.org/10.1126/scirobotics.adi5908
| 相關(guān)新聞: |
| 真牛!皮牛彈簧打造超靈敏機器人 |
| 新技術(shù)讓水下機器人擁有“觸覺” |
| “無腦”機器人可逃脫復(fù)雜迷宮 |

京公網(wǎng)安備110402500036號
© 中國科學(xué)院微電子研究所 版權(quán)所有
地址:北京市朝陽區(qū)北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學(xué)習(xí)園地