
智能機器人執行超精細操作任務時,如何在復雜環境中通過觸覺辨別細微壓力(如流體環境)是一項亟待解決的技術瓶頸。盡管高靈敏度柔性觸覺傳感器已有大量研究報告,但由于柔性傳感器易受到本征噪聲的限制,在實際應用中的壓力分辨率水平仍難以滿足需求。
近日,中國科學院重慶綠色智能技術研究院研究團隊受人體指尖默克爾細胞啟發,提出一種共形石墨烯納米墻-六方氮化硼-石墨烯(CGNWs-hBN-Gr)準二維垂直隧穿觸覺傳感器,利用hBN隧穿通道模擬PZ蛋白的生物機械門控離子通道,通過微納米多尺度力敏界面實現了原子層間隧穿電流的宏觀調控。
此外,hBN蓋層和隧穿效應可有效抑制陷阱電荷,從而降低器件1/f噪聲。實驗數據顯示,該傳感器靈敏度高達1.99×106?kPa-1,在10 Hz頻率下的噪聲功率譜密度僅為2.2×10-24?A2/Hz,噪聲等效壓力(NEPr)低至7.96×10-3?Pa,信噪比高達68.76 dB。研究團隊建立了機器人指尖液體識別系統,通過對比COMSOL仿真與實際測試數據,捕捉到液體接觸過程中的微動態特征,配合過渡感知上下文注意力網絡(TacAtNet)模型,實現不同溶液甚至同一溶液的不同濃度的識別,在不同濃度的酒精(0%、25%、50%、75% 和 99%)中識別率高達98.1%。
該項技術增強了機器人在復雜環境中的感知能力,為下一代機器人的先進應用提供了保障。
相關研究成果以Superlow-Noise Quasi-2D Vertical Tunneling Tactile Sensor for Fine Liquid Dynamic Recognition為題,發表在ACS Nano上。研究工作得到國家自然科學基金、國家重點研發計劃等的支持。
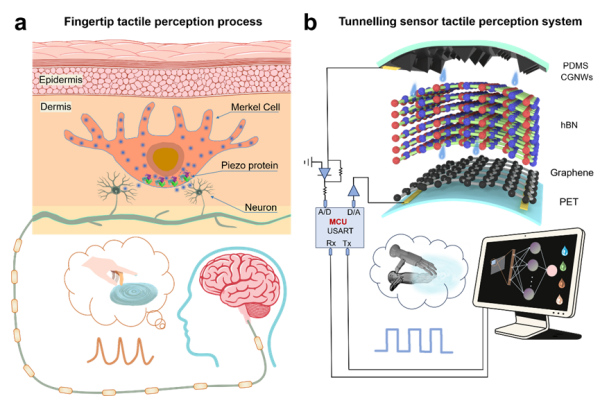
仿生觸覺傳感結構和感知過程
| 相關新聞: |
| 科學家實現3D打印石墨烯微型超級電容器構筑與單片集成 |
| 上海微系統所石墨烯量子點熒光發光機制研究獲進展 |
| 金屬所在基于金剛石/膨脹垂直石墨烯的層狀限域雙電層電容行為的研究獲進展 |

京公網安備110402500036號
© 中國科學院微電子研究所 版權所有
地址:北京市朝陽區北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學習園地